|
Календарь
Архив
Популярное
О сайте
Увлекательные фотографии и видео в удобной подаче? Запросто! Теперь мы можем Вас радовать подборками со всех сайтов которые мы посчитали интересными. Видео которое мы отбираем каждый день, убьет много свободного времени и заставит Вас поделится им с Вашими коллегами и друзьями, а в уютное время, Вы покажете это видео своим родественникам. Это все, Невседома. |
 0+ Идея робота, который может перемещаться по веревке, пользоваться скейтбордом и летать, может звучать как концепция из научной фантастики. Но такой робот вполне реален! Лео - это двуногий робот, у которого для устойчивости есть двигатели, как у дрона.Он был построен из частей роботов и дронов, собранных в лаборатории инженерами Калифорнийского технологического института в Пасадене. Помимо повышения устойчивости при ходьбе по канату, подруливающие устройства на основе пропеллера также позволяют роботу высотой около 70 сантиметров подниматься в воздух и летать.  Команда создателей говорит, что когда-нибудь Лео сможет применить свои способности в роботизированных миссиях, которые в настоящее время трудны для наземных или воздушных роботов и дронов или людей, в том числе, для работы в опасных и труднодоступных местах. Создатели не сообщили, когда Лео будет доступен для коммерческого использования и сколько он будет стоить, так как робот пока находится на стадии исследований и разработок. Однако уже сейчас, говорят инженеры, они занимаются поисками партнера-производителя и надеются найти его в ближайшем будущем.  Лео - это многосуставной двуногий робот, на создание которого, как утверждают создатели, их натолкнули разнообразные виды птиц и насекомых. Он движется со скоростью около 20 см в секунду, но ее можно увеличить, если почаще отправлять его в полет. «Используя прерывистый полет, находясь близко к земле, он может летать со скоростью 3-5 м / с», - пояснили разработчики. - Мы черпали вдохновение в природе. Когда у птицы ходьба сменяется полетом, - этот момент нас очень интриговал. Мы хотели понять это и извлечь из этого уроки, изучить взаимодействие ходьбы и полета с точки зрения динамики и контроля». 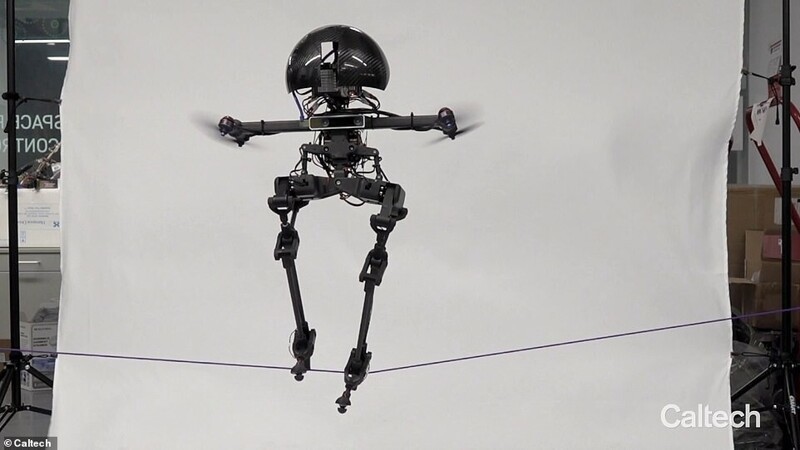 Уже сегодня создатели думают о будущем Лео. «Возможно, наиболее подходящими для него будут задачи, которые связаны с физическим взаимодействием со структурами на большой высоте», - говорят они. Эти задачи, к примеру, осмотр высоковольтных линий или ремонт частей космической станции, обычно очень опасны для рабочих-людей и требуют использования нескольких типов наземных и воздушных роботов, но Лео может выполнить эту задачу в одиночку. 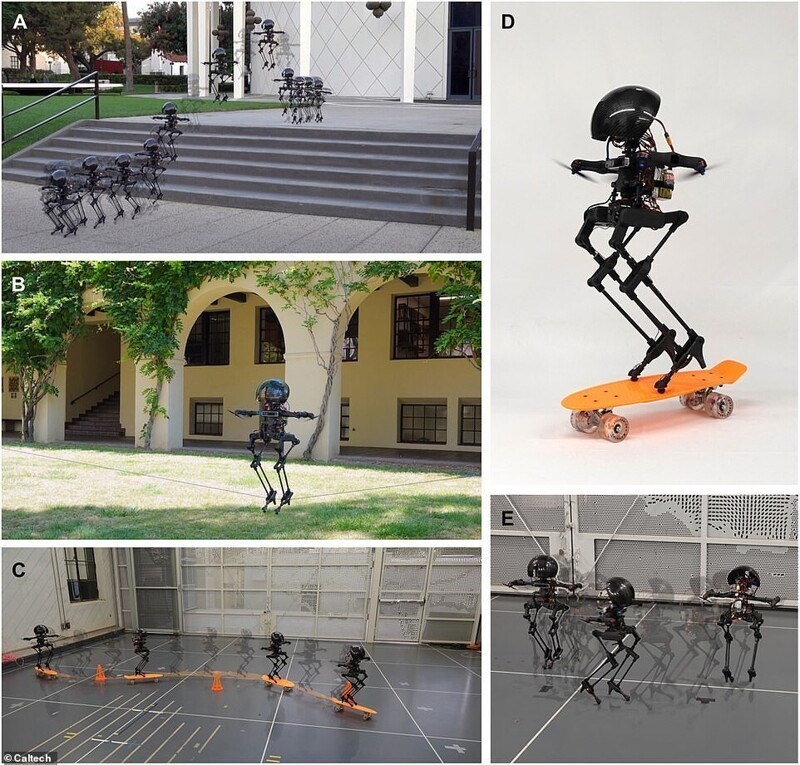 Двуногие роботы преодолевают реальную местность, используя те же движения, что и люди, включая прыжки, бег и лазание. Тем не менее, они часто попадают в тупик из-за особенно пересеченной местности, где и появляются летающие роботы, поскольку они перемещаются не по ней, а над ней, тем самым избегая опасностей. Несмотря на преимущества, у летающих роботов есть свои проблемы, в том числе особенно высокое потребление энергии и ограничения полезной нагрузки из-за веса. «Роботы со способностью к мультимодальному перемещению могут перемещаться в сложных условиях более эффективно, чем традиционные роботы, за счет надлежащего переключения между доступными им средствами передвижения», - говорят разработчики. 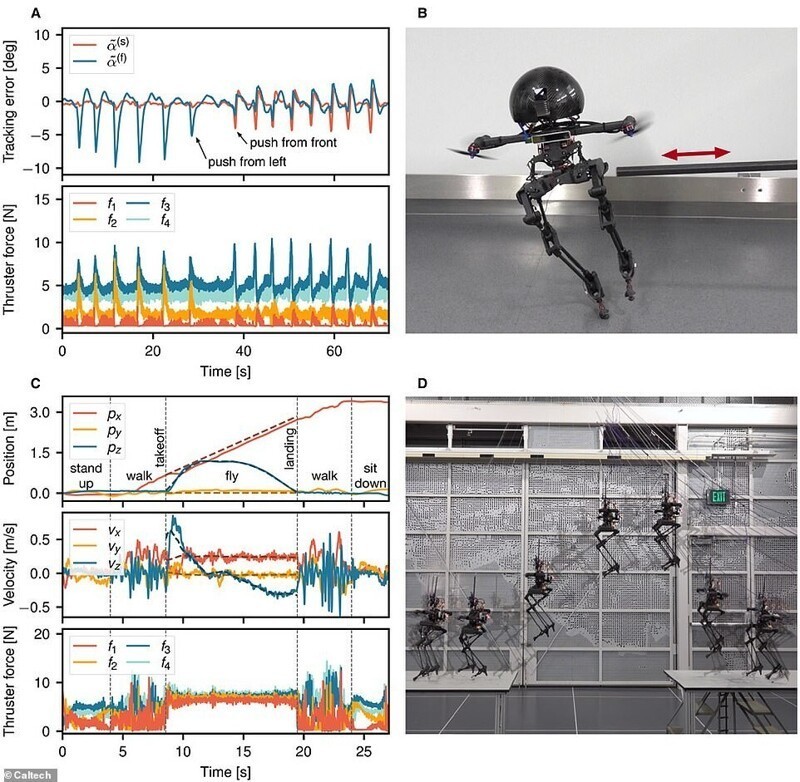 «В зависимости от типов препятствий, которые необходимо преодолеть, Лео может выбрать ходьбу или полет, или смешать их по мере необходимости, - говорит Патрик Шпилер, со-ведущий автор исследования. - Кроме того, Лео способен выполнять необычные маневры передвижения, которые даже у людей требуют мастерства равновесия, например, ходьба по веревке или катание на скейтборде».  Обладая глубоким пониманием окружающей среды, Лео может принимать собственные решения относительно наилучшего сочетания ходьбы, полета или гибридного движения, которое следует использовать для перемещения из одного места в другое. Принимая решение, он исходит из того, что будет наиболее безопасным и отнимет наименьшее количество энергии. Команда планирует улучшить характеристики Лео, создав более жесткую конструкцию ног, которая способна выдержать большую часть веса робота и увеличить силу тяги пропеллеров. Кроме того, они надеются сделать Лео более автономным, чтобы робот мог "понимать", какая часть его веса поддерживается ногами, а какая - пропеллерами при ходьбе по неровной местности. Исследователи также планируют оснастить робота недавно разработанным алгоритмом управления посадкой дронов, который использует глубокие нейронные сети.  "Мы планируем улучшить конструкцию ног, чтобы Лео мог ходить и балансировать с минимальной помощью пропеллеров", - говорят разработчики. По их мнению, технология, разработанная для этой цели, может способствовать разработке систем адаптивного шасси, состоящих из управляемых суставов ног для воздушных роботов и других типов летательных аппаратов. Загружается видео...
| ||||||||||||||||||||||||||||||||||||||||||||||||||

